টিউটোরিয়াল বানানোর সময় পাচ্ছিনা। নিজের কাজ নিয়ে বেশ ঝামেলায় আছি। অনেকেই ঘুড়ে যাচ্ছেন নতুন কিছু দিয়েছি কিনা, মূলত তাদের জন্যই ভাবলাম একটা পোষ্ট দিয়ে বিরতির কথা জানিয়ে দেই। আমি জুলাই মাসের মাঝামাঝি থেকে আবার বেশ বড়সড় করেই আবার শুরু করবো। আরো চমক থাকবে, তারপর ও বেশ কিছু জিনিষ সিরিয়াসলি দেখাবো এটা বোঝানোর জন্য একটা ভিডিও বানিয়ে ফেললাম। 🙂
আশা করছি জুলাই এর মাঝামাঝি থেকে নিয়মিত হব। জুন এ কোনো টিউটোরিয়াল আসবেনা প্রায় নিশ্চিত। তবে কোনো কিছু নিয়ে হাবিজাবি লিখতে পারি।
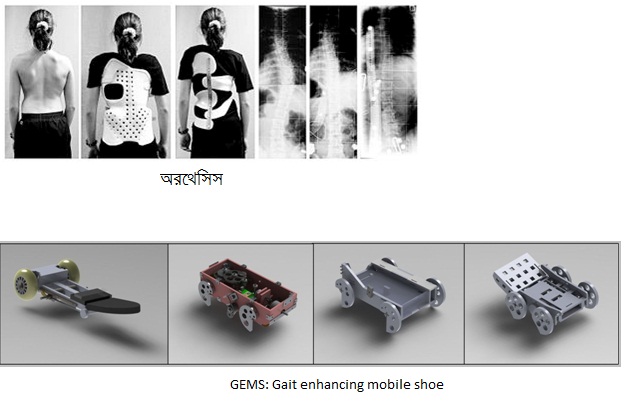
Rehabilitation শব্দটা ভেঙ্গে যা বুঝি, Re অর্থাত আবার, habitare, অর্থাত “make fit.” তবে ”শব্দ” টা অনেকটা এরকম অর্থে ব্যবহার হয়, কোনো দুর্ঘটনা বা অপারেশন জনিত কারনে আমাদের শারিরীক প্রতিবন্ধকতা দূর করে নরমাল অবস্থায় ফিরিয়ে আনার প্রসেস। তো বোঝা গেল যে, Rehabilitation বলতে আসলে physical disabilities থেকে নরমাল স্টেজে ফিরিয়ে আনার প্রক্রিয়া বা কিছুটা ভালো অনুভব করার বিদ্যাকে বুঝায়। Rehabilitation এর কথা বললেই আরও যে কয়েকটা শব্দ চলে আসে, বায়োমেডিক্যাল, বায়ো মেকানিক্স, রোবটিক প্রসথেসিস, অরথসিস (prosthesis- আর্টিফিসিয়াল হাত পা প্রতিস্থাপন কে বলে) (অরথসিস হল আমাদের শরীরের এর কোনো বাইরের অংশের জন্য বানানো কোন যন্ত্র/এটাচ মুভিং পার্ট যেটা আমাদের স্কেলেটাল মোশনের সাথে সামঞ্জস্যপূর্ন অথবা স্কেলেটাল মোশন কে সঠিক মুভমেন্ট দিতে সাহায্য করে এমন কিছু, চিত্র দেখুন) সাইকোলজি, মেডিটেশন, মেন্টাল হেলথ নিউরোবিজ্ঞান অনেকাংশে জড়িত এই বিদ্যায় ।
চিত্রঃ প্রস্থেটিক লেগ
চিত্রঃ ডেকা আর্ম
চিত্রঃ ইন্টেলিজেন্ট হুইলচেয়ার ও রোবটিক হ্যান্ড যা মানুষের হাত টার অনুকরন করছে, কিছু সিগন্যাল নিয়ে
Physical disability অনেক রকম হতে পারে। সরাসরি হাত পা প্রতিস্থাপন ছাড়াও, হাটা চলা নরমাল গেইট ফিরিয়ে আনা(GAIT enhancing shoe), হতে পারে মুখে মার্বেল রেখে তোতলামি দূর করা 😀 , ব্রেইন ইন্টারফেস থেকে সিগন্যাল নিয়ে কোনো কিছুর একচুয়েশন–> হাত বা পা, অথবা অন্য কোন অব্জেক্ট কে মুভ করানো, সম্পূর্ন নড়তে অক্ষম ব্যাক্তির ইচ্ছা মত হুইল চেয়ার চালানো অন্য কোনো নিয়ন্ত্রন ছাড়া। তবে Rehabilitation শুধু ফিজিক্যাল একচুএশন এ আটকে নাই। বর্তমানে এই ফিল্ডের গবেষনা আরো অনেক ব্যাপক ।
ইউ এস এফ (USF)এর এই গবেষনার ভিডিও টি দেখুন
খুব অবাক হয়েছেন? আসলে অবাক হওয়ার কিছু নাই। ব্রেইন ইন্টারফেসিং নিয়ে কিছু লিখেছি এখানে।
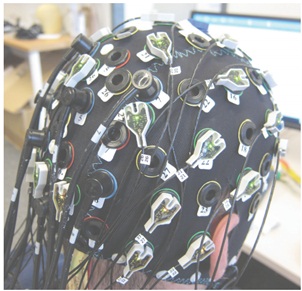
আমরা যখন কোনো কিছুর দিকে তাকাই, পলক ফেলি, অথবা ডান বায়ে ওপরনিচ চোখ সরাই (কিছুটা ভিজুয়াল ইনপুট) অথবা কোনো কিছু চিন্তা মগ্ন/ অবসন্ন, দুঃখ, আনন্দ, রাগ করি, এগুলা সবগুলা ঘটনাই আমাদের মস্তিস্কে কিছু পরিবর্তন ঘটায়। এই পরিবর্তন গুলা measure করা হয় কিছু মেথড এ। EEG-electroencephalography, NIRS-Near Infrared Spectroscopy এরকম ই কিছু পরিচিত গবেষনা যেগুলো প্রতিনিয়ত হচ্ছে ব্রেইন এর ওপর।
আমাদের কাজকর্ম, মোশন, চিন্তা বা আবেগে আমাদের নিউরনের এক্টিভিটি পাল্টায়।
নিউরনের আয়োনিক ফ্লো এর জন্য যে বিভব (voltage) এর পরিবর্তন হয়, তা Measurement হল EEG।
আর Near Infrared Spectroscopy একধরনের ইমেজিং টেকনিক যেটা low energy radiation দিয়ে ব্রেইন টিস্যুর absorption change গুলো বের করে। These absorption changes reflect changes in the local concentration of oxy- and deoxyhaemoglobin, which in turn are related to and triggered by the alteration of neural activity.
এই EEG-NIRS থেকে সিগন্যাল গুলো দিয়ে একজন মানুষের ‘নির্দিষ্ট কাজের –> যেমন ডানে তাকানো’ জন্য তার ব্রেইন এক্টিভিটি বের করা যায়। পরে ওই এক্টিভিটি কে কোনো একচুএশন ডিসিশন হিসেবে নেয়া যায় রোবটিক আর্ম বা অন্য কিছুতে। কখনো কখনো ব্রেইন সিগ্ন্যাল এর সাথে চোখের পাতা, মনি এগুলার মুভমেন্ট আরো ভালো ভাবে বোঝার জন্য ক্যামেরাও ব্যবহার হয়।
এছাড়াঃ
হার্ট এ পাম্প প্রতিস্থাপন, রিং পড়ানো এগুলা সরাসরি Rehabilitation নামে পরিচিত নামে পরিচিত না, এগুলা নিয়েও প্রচুর কাজ হচ্ছে। হ্যাপ্টিক রিইয়েলাইজেশন, স্ট্রোক, ব্লাড প্রেশার এই মেজারমেন্ট গুলা নিয়ে বিহেভিয়ার এনাইলাইস হচ্ছে, নতুন নতুন প্রযুক্তি আবিষ্কার হচ্ছে।
চিত্রঃ হাত ও পা এর প্রেশার পয়েন্ট এর ডিটেইল
তো আমরা দেখলাম Rehabilitation শব্দটা শুধু শাব্দিক অর্থে আটকে নেই। গবেষনার ব্যাপ্তিও অনেক।
আরো কত গবেষনা হচ্ছে! কোনো শেষ নেই। আপনি ও শুরু করতে পারেন যেকোনো গবেষনা, সেটা যে উন্নত দেশ গুলার মতই যে হতে হবে, এরকম ভাবলে বোকামি করছেন। গবেষনার জন্ম হয় সমস্যা থেকে। আমাদের সমস্যা আমাদের কেই মিটাতে হবে।
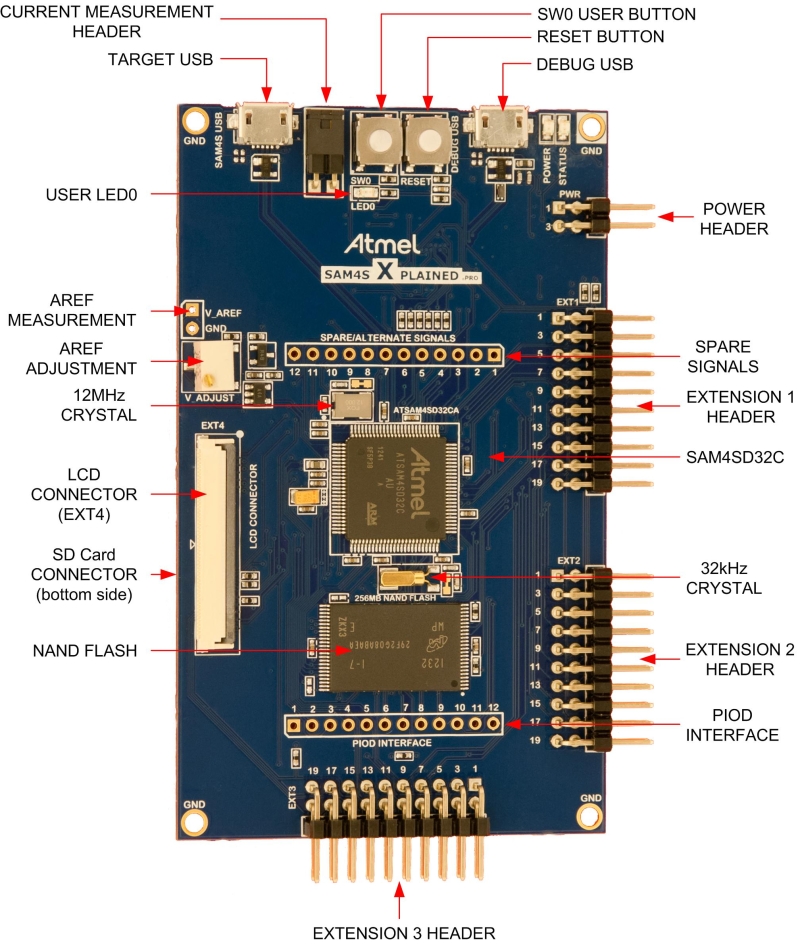
আজকের লেকচারে আমরা SAM4S starterkit এর হার্ড ওয়ার সেট আপ দেখবো, আর এটমেল এর একটা ডেমো প্রজেক্ট (ATMEL ASF)ডাউনলোড করে দেখবো। এরপরের লেকচার থেকে আমরা ক্লক সোর্স শুরু দিয়ে করবো, এবং ATSAM4SD32c এর বিভিন্ন পেরিফেরাল ব্যবহার করার কোড লেখা শুরু করবো।
আপনি দুনিয়ার যে প্রান্ত থেকেই এই পেইজে এসে থাকেন, ডেস্কটপ-ল্যাপ্টপ, মোবাইল, ট্যাব, প্যাড প্রায় নিশ্চিত ভাবেই বলা যায় ARM-processor based কিছু না কিছু আপনার ব্যবহ্রত যন্ত্রে আছেই। জি, ARM –core এতটাই বহুল প্রচলিত, প্রায় সমস্ত এম্বেডেড ম্যানুফ্যাকচাররাই এই প্রসেসর তাদের সুবিধামত পরিবর্তন পরিবর্ধন করে ব্যবহার করেছে, করছে। ARM সম্পর্কে যেকোনো কিছু বললেই তা কম বলা হবে, তারচেয়ে নিচের ভিডিও টি দেখে নিন।
আমাদের এই টিউটিউরিয়াল গুলোর উদ্দেশ্য কিছু কিছু জিনিষ আনকভার করা, যাতে আপ্নারা নিজেদের মত ডেভেলপ করে নিতে পারেন। শুরুতে আর্ম বেইসড Atmel sam4s xplained pro kit (http://www.atmel.com/tools/ATSAM4S-XSTK.aspx) দিয়ে আমরা এম্বেডেড প্রোগ্রামিং শুরু করবো। এরপর টেক্সাস ইন্সট্রুমেন্ট এর কোনো একটা ডি এস পি দেখাবো। ইচ্ছা আছে বিগল বোন র্যাসবেরি পাই নিয়ে কিছু পোষ্ট দেয়ার।
ARM এর সংক্ষিপ্ত কিছু সুবিধা।
Floating point processor can multiply
High core density, low power high computational performance
Thumb composed. Capable to deal 16 bit operation in 32 bit processor. this allows more instruction set to be stored.
DSP instruction set
–৮ বিট মাইক্রোকন্ট্রলার শিখলে কি ৩২ বিট দরকার আছে?
ডিপেন্ডস অন এপ্লিক্যাশন। তবে ৮ বিট আর ৩২ বিট মাইক্রো এর তফাত আকাশ পাতাল। অনেকটা ২৫৫ আর ৩২ বিট এর সবচেয়ে বড় ভ্যালুর মত পার্থক্য। 😀
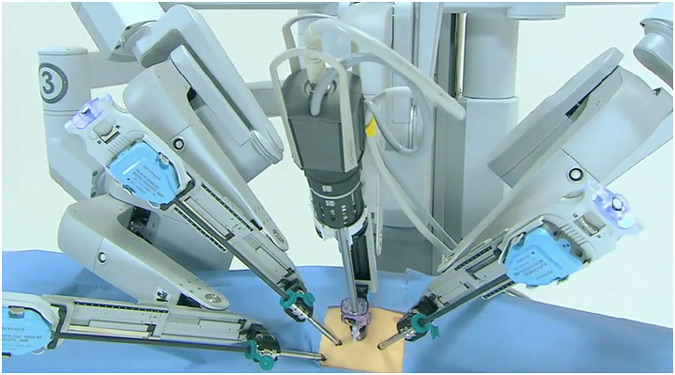
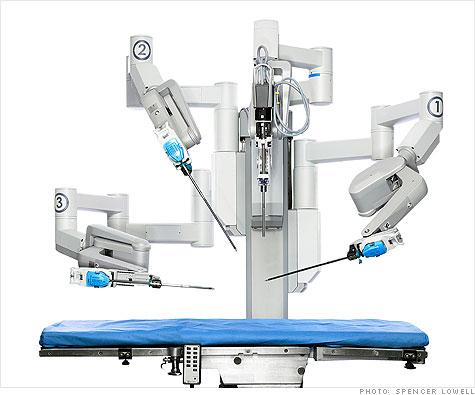
রোবটিক সার্জারি উন্নত দেশগুলাতে প্রতিনিয়ত হচ্ছে। এই সার্জারির অনেকগুলা সুবিধা আছে, কিছু অসুবিধাও আছে। সুবিধা-অসুবিধা বলার আগে নিচের ছবি গুলো ভালমতো খেয়াল করি।
খুব সাধারন ভাবে বলতে গেলে এই ধরনের সার্জারিতে শরীরের ভেতর সার্জিক্যাল ইন্সট্রুমেন্ট প্রবেশ করে, এবং ডাক্তারের হাতের কাজগুলা “ইন্সট্রুমেন্ট” করে। ইন্সট্রুমেন্ট গুলা কি নিজে নিজে করে? নাহ, 🙂 একজন ডাক্তার দূর থেকে বসে এগুলা নিয়ন্ত্রন করেন। নিচের ছবিটি হল সার্জিক্যাল ইন্সট্রুমেন্ট।
কাজ অনুযায়ী এই ইন্সট্রমেন্ট গুলার হেড একেক রকম, যেমন, সেলাই, কাটা বা অন্যান্য কাজের জন্য আলাদা আলাদা ইন্সট্রুমেন্ট আছে, নিচের চিত্রের মত। এগুলো কে বলে Endowrist instrument.
এই ইন্সট্রুমেন্ট গুলা প্রায় সবগুলোই 7 DOF-ডিগ্রি অফ ফ্রিডম। (ভিডিও দেখে বুঝতে হবে) মানুষের হাতের চেয়ে অনেক এফিসিয়েন্ট, এগুলার মোশন এবিলিটি আর প্রিসিশন অনেক বেশি। ‘সিঙ্গুলারিটি’ (পরে কখনো ব্যাখ্যা করবো) এড়ানোর জন্য বিশেষ ভাবে তৈরি।
এরকম একটি ইন্সট্রুমেন্ট কন্ট্রল করা হয় চারটি মোটর দিয়ে। চারটি মোটর দিয়ে ‘সাত’ DOF কিভাবে হয় সেটাও পরে অন্য পোস্টে ব্যাখা করবো।
সাধারনত এই ধরেনের সার্জারি রোগীর শরীরে কয়েকটি ছোট ছোট ছিদ্র করা হয়। (১০ মিমি বা তারও কম) ছিদ্র গুলা দিয়ে প্রয়োজনীয় ইন্সট্রুমেন্ট প্রবেশ করে। (৪ টি সাধারনত ) একটা ছিদ্র দিয়ে ঢোকানো হয় হাই ডেফিনিশন 3D ক্যামেরা। এই ক্যামেরা দিয়ে অভ্যন্তরীন অবস্থা দেখে দেখে একজন ডাক্তার দূরে বসে একটি ম্যানিপুলেটর কে কন্ট্রল করেন, যেটা কে বলে মাস্টার। মাস্টার এর মোশন কে রোগীর শরীরের ভেতর ইন্সট্রুমেন্ট মিমিক (অনুকরন) করে। এভাবে অপারেশন টি সম্পন্ন হয়।
এখন একটি সার্জারি দেখে আসি,
এতক্ষনে অনেক গুলো সুবিধা বের হয়ে গেল,
ছোট ছিদ্র তাই রোগীর জন্য পেইন কম, রিকভারী তাড়াতাড়ি, কম ওষুধ -> কম খরচ। ইনফেকশন হওয়ার চান্স খুব কম থাকে, কারন ওপেন সার্জারির মত বিশাল অংশ কাটা লাগেনা শরীরে, বাইরের জীবানু ঢোকা, মানুষের হাতের স্পর্শ, কেচি শরীরের ভেতর ভুলে রেখে দেয়া এসব অসুবিধা নাই।
অসুবিধা হল, এই সিস্টেমে হাইলি-ট্রেইন্ড-স্কিল্ড ডাক্তার দরকার। ‘হ্যাপ্টিক্স’ বা সেন্স অফ টাচ এবসেন্ড। শুধুমাত্র ভিজুয়াল ফিডব্যাক দেখে রিয়াকশন ফোর্স বের করা মুশকিল। খুবি এবং খুবি প্রিসাইস কন্ট্রল সিস্টেম লাগে। সামান্য ভুল মোশন কোনো অর্গান নষ্ট করে ফেলতে পারে, তাই “ভুল” বলে কিছু থাকা যাবেনা সিস্টেমে।
সার্জিক্যাল রোবটিক্স বলতে “শুধু এতটুকুই” না। আমরা এখানে শুধু ল্যাপোরোস্কপিক / MIS (minimally invasive surgery) সম্পর্কে খুব সামান্য জানলাম।
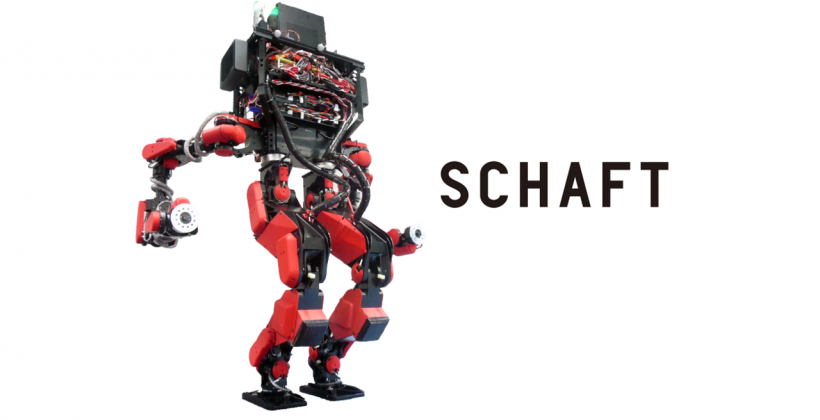
পূর্বকথাঃ ফুকুশিমার নিউক্লিয়ার বিপর্যয়ের পর ডিজাস্টার রেস্পন্স রোবটের চাহিদা বেড়ে গেছে। এর আগে হিয়ম্যানয়েড রোবট নিয়ে খুব কম আগ্রহ দেখিয়েছিলেন রিসার্চাররা। অনেকটা এন্টারটেইনমেন্টই হিয়ম্যানয়েড এর ব্যবহার সীমিত অথবা বাসা বাড়ি শপিং মল গুলোই এর একমাত্র এপ্লিকেশন, এমন ধারনাটা ই পোক্ত ছিল। ধারনাটা পালটে যায় জাপানের নিউক্লিয়ার বিপর্যয়ের পর। একটা চুল্লী বন্ধ করতে পারলে অনেক খানি ধস কমানো যেতো এরকমই বলেছিলেন প্রতক্ষ্যদর্শীরা। কিন্তু ভঙ্গুর প্ল্যান্টে নিউক্লিয়ার রেডিয়েশনের মাঝে ঢুকে চুল্লির একটা কন্ট্রোল ভাল্ভ ঘুড়িয়ে দিয়ে আসবে কে?
‘আসিমো’, ১৪ বছর ধরে তৈরী হোন্ডার রোবট, এধরনের কাজের জন্য প্রস্তুত ছিল না। কারন আসিমো কেবল প্লেন সার্ফেসেই হাটতে সক্ষম। তখন থেকেই সারা বিশ্বে হিয়ম্যানয়েড রোবট ডিজাস্টার রেস্পন্স রোবট হিসেবে রিসার্চারদের মাঝে জনপ্রিয়তা পায়। কারন এধরনের সিচুএশনে হিউম্যানয়েড ই সবচেয়ে উপযুক্ত। হাটা, ভাঙ্গা ইট/ ওয়াল পেরিয়ে যেতে সক্ষম, অবস্টাকল এড়ানো, মই বাওয়া, সিড়ি বাওয়া, গাড়ি চালানো, টুল হ্যান্ডেলিং, ভাল্ভ ওপারেশন, হামাগুড়ি তথা টার্গেট প্লেসটায় যে কোনো মূল্যে রিচ করতে মানুষ টাইপ রোবট ই সবচেয়ে এফেক্টিভ।
এঘটনার পরই এই কন্টেস্ট এর এনাওন্স করে ডারপা। ডারপা হলো আমেরিকার Defense Advanced Research Projects Agency । এই প্রতিযোগীতায় ৮ টি টাস্ক পারতে হবে এরকম রোবট বানাতে হবে বলে জানানো হয়। মাত্র কিছুদিন আগে, ডিসেম্বরের ২০-২১ তারিখে এটি অনুষ্ঠিত হল ফ্লোরিডাতে। ১৬ টি দল এতে অংশ গ্রহন করে। প্রতিযোগীতায় প্রথম হয় জাপানের একটি দল। অনেক প্রত্যাশা থাকলেও কাইস্টের (KAIST- South korea) এর তৈরী HUBO হয়েছে ১১ তম 😀 ।
এই কাজটা করা হয়েছে বাংলাদেশের প্রত্যন্ত অঞ্চলের সুবিধা বঞ্চিত মানুষের জন্য। কাজটিতে ছিলেন ঢা বি বায়োমেডিক্যাল ফিজিক্স ডিপার্টমেন্টের চেয়ারপার্সন রব্বানি স্যার, রায়হান আবির, জামান নিপুন ও আমি।
রোবটিক্স, মেকাট্রনিক্স আর কন্ট্রোল ইঞ্জিনিয়ারিং নিয়ে লিখবো। পোষ্ট গুলা হবে মূলত তথ্যমূলক অথবা টিউটোরিয়াল টাইপ। এগুলা পোষ্টানোর কোনও উদ্দেশ্য নাই, নিতান্ত ভালো লাগা থেকে করা। কারো উপকারে লাগলে তা বোনাস। “সমসাময়িক রোবটিক্স” নিয়ে লিখতে বেশি আগ্রহী আমি। বাংলাতে এই ফিল্ড গুলাতে খুব ভাল কোনো রিসোর্স আছে বলে আমার জানা নাই। ব্যক্তিগত অভিজ্ঞতায় দেখেছি যে, রোবটিক্স এর ফিল্ড সম্পর্কে অনেকই খুব ভালো ধারনা রাখেন না। কারো কারো কাছে রোবটিক্স বলতে শুধুই কিছু লাইন ফলোয়ার আর গ্রিপার ই 🙂 জ্ঞান ছড়িয়ে দিন, তবে লেখাগুলা অন্য কোথাও উপযুক্ত মূল্যায়ন ছাড়া কপি পেস্ট বা প্রকাশ না করতে বিশেষ ভাবে অনুরোধ করছি। ভালো লাগলে শেয়ার দিন সোস্যাল নেট ওয়ার্ক গুলোতে।
লেখক পরিচিতি
আমি নাহিয়ান রহমান (Nahian Rahman), জন্ম-বেড়ে উঠা ঢাকাতে। বর্তমানে পি এইচ ডি করেছি এডভান্সড রোবোটিক্স এ, http://iit.it/en/people/nahian-rahman কন্ট্রোল ইঞ্জিনিইয়ারিং এ মাস্টার্স করেছি কোরিয়ার Pusan National University (lab member http://mclab.me.pusan.ac.kr/) থেকে। ইটালি আর কোরিয়ার প্রবাস ছাড়া বাকী জীবন কেটেছে ঢাকা ইউনিভার্সিটি কোয়াটারে। কোনো কালেও কোনো পদের ছাত্র ছিলাম না, তারপর ও অনেকের চেয়ে লাকি কারন ছাত্রজীবনে খুব একটা দোড় পারা লাগেনি, স্কুল ছিল উদয়ন, ক্যাম্পাসেই, কলেজ রাইফেলস পাব্লিক, এটাও তেমন দূরে না, পরে ছিলাম বাংলাদেশ প্রকৌশল বিশ্ববিদ্যালয় এ। মেকানিক্যাল ইঞ্জিনিয়ারিং ‘কষ্টসাধ্য’ স্নাতক শেষ করি ২০০৯ এ। ২-২ এর শেষের দিকে দল বেধে সোহাগ ভাইদের পাইল্যাবস এ যাই, প্রবল আগ্রহে সবকিছু বাদ দিয়ে মাইক্রোকন্ট্রলার শিখা শুরু করি। মূলত তখন থেকেই রোবট রিলেটেড কিছু করার বা পড়ার ইচ্ছা। এছাড়া জাপানে অনুষ্ঠিত রোবোকোন-২০০৯ এর মেকবুয়েটে দলে কিছু কাজ(!) করেছিলাম। মাইক্রোকন্ট্রলার এর beginner দের জন্য একটা পেইজ বানাইছিলাম, কারো আগ্রহ থাকলে দেখতে পারেন। http://nahians-avr.webs.com/