রোবটিক সার্জারি উন্নত দেশগুলাতে প্রতিনিয়ত হচ্ছে। এই সার্জারির অনেকগুলা সুবিধা আছে, কিছু অসুবিধাও আছে। সুবিধা-অসুবিধা বলার আগে নিচের ছবি গুলো ভালমতো খেয়াল করি।
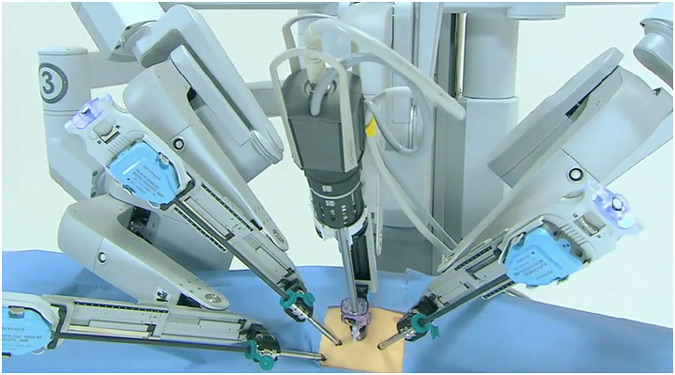
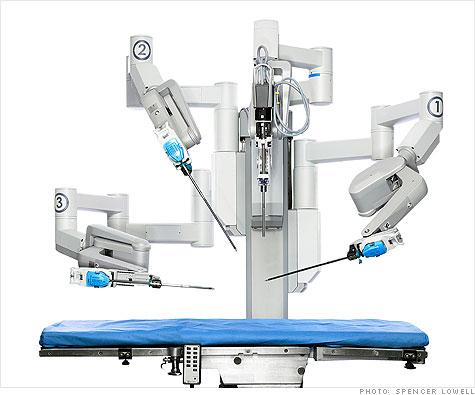


চিত্রে আমরা যে ধরনের সার্জিক্যাল রোবট দেখছি, তা হচ্ছে : Da vinci surgical System. http://www.intuitivesurgical.com/products/davinci_surgical_system/
খুব সাধারন ভাবে বলতে গেলে এই ধরনের সার্জারিতে শরীরের ভেতর সার্জিক্যাল ইন্সট্রুমেন্ট প্রবেশ করে, এবং ডাক্তারের হাতের কাজগুলা “ইন্সট্রুমেন্ট” করে। ইন্সট্রুমেন্ট গুলা কি নিজে নিজে করে? নাহ, 🙂 একজন ডাক্তার দূর থেকে বসে এগুলা নিয়ন্ত্রন করেন। নিচের ছবিটি হল সার্জিক্যাল ইন্সট্রুমেন্ট।


কাজ অনুযায়ী এই ইন্সট্রমেন্ট গুলার হেড একেক রকম, যেমন, সেলাই, কাটা বা অন্যান্য কাজের জন্য আলাদা আলাদা ইন্সট্রুমেন্ট আছে, নিচের চিত্রের মত। এগুলো কে বলে Endowrist instrument.

এই ইন্সট্রুমেন্ট গুলা প্রায় সবগুলোই 7 DOF-ডিগ্রি অফ ফ্রিডম। (ভিডিও দেখে বুঝতে হবে) মানুষের হাতের চেয়ে অনেক এফিসিয়েন্ট, এগুলার মোশন এবিলিটি আর প্রিসিশন অনেক বেশি। ‘সিঙ্গুলারিটি’ (পরে কখনো ব্যাখ্যা করবো) এড়ানোর জন্য বিশেষ ভাবে তৈরি।
এরকম একটি ইন্সট্রুমেন্ট কন্ট্রল করা হয় চারটি মোটর দিয়ে। চারটি মোটর দিয়ে ‘সাত’ DOF কিভাবে হয় সেটাও পরে অন্য পোস্টে ব্যাখা করবো।
সাধারনত এই ধরেনের সার্জারি রোগীর শরীরে কয়েকটি ছোট ছোট ছিদ্র করা হয়। (১০ মিমি বা তারও কম) ছিদ্র গুলা দিয়ে প্রয়োজনীয় ইন্সট্রুমেন্ট প্রবেশ করে। (৪ টি সাধারনত ) একটা ছিদ্র দিয়ে ঢোকানো হয় হাই ডেফিনিশন 3D ক্যামেরা। এই ক্যামেরা দিয়ে অভ্যন্তরীন অবস্থা দেখে দেখে একজন ডাক্তার দূরে বসে একটি ম্যানিপুলেটর কে কন্ট্রল করেন, যেটা কে বলে মাস্টার। মাস্টার এর মোশন কে রোগীর শরীরের ভেতর ইন্সট্রুমেন্ট মিমিক (অনুকরন) করে। এভাবে অপারেশন টি সম্পন্ন হয়।

এখন একটি সার্জারি দেখে আসি,
এতক্ষনে অনেক গুলো সুবিধা বের হয়ে গেল,
ছোট ছিদ্র তাই রোগীর জন্য পেইন কম, রিকভারী তাড়াতাড়ি, কম ওষুধ -> কম খরচ। ইনফেকশন হওয়ার চান্স খুব কম থাকে, কারন ওপেন সার্জারির মত বিশাল অংশ কাটা লাগেনা শরীরে, বাইরের জীবানু ঢোকা, মানুষের হাতের স্পর্শ, কেচি শরীরের ভেতর ভুলে রেখে দেয়া এসব অসুবিধা নাই।
অসুবিধা হল, এই সিস্টেমে হাইলি-ট্রেইন্ড-স্কিল্ড ডাক্তার দরকার। ‘হ্যাপ্টিক্স’ বা সেন্স অফ টাচ এবসেন্ড। শুধুমাত্র ভিজুয়াল ফিডব্যাক দেখে রিয়াকশন ফোর্স বের করা মুশকিল। খুবি এবং খুবি প্রিসাইস কন্ট্রল সিস্টেম লাগে। সামান্য ভুল মোশন কোনো অর্গান নষ্ট করে ফেলতে পারে, তাই “ভুল” বলে কিছু থাকা যাবেনা সিস্টেমে।
সার্জিক্যাল রোবটিক্স বলতে “শুধু এতটুকুই” না। আমরা এখানে শুধু ল্যাপোরোস্কপিক / MIS (minimally invasive surgery) সম্পর্কে খুব সামান্য জানলাম।
